1、引言
与串行数据测试特点有关的许多内容,主要是位速率和上升时间及示波器特点,如带宽、滚降速率、平坦度、相位响应等等,这些特点之间相互影响,决定着在测量眼图时示波器屏幕上显示的内容。实际上群延迟对串行数据眼图测试也同样重要。
2、示波器群延迟特点
2、1 砖墙响应
所有高端实时数字示波器在带宽点之后,在幅度响应中都会表现出急剧滚降。这是因为示波器制造商在努力跟上业内的带宽需求增长。响应急剧滚降对阶跃响应有着负面影响。在带宽点以后,滚降速率通常会非常快,以致示波器可以视为拥有“砖墙”响应。
有两种方式建立砖墙响应模型。一种方式是对sinc脉冲取逆傅立叶变换,设计有限脉冲响应(FIR)滤波器,这会提供典型的Sin(x)/x脉冲响应。这样的砖墙模型的阶跃响应表现出人们熟悉的吉布斯振荡。人们之所以不想要急剧截止频率,是因为它会引起过冲和振铃,但这在示波器耗尽响应时不可避免。但是如果不是有延迟的话,响应会表现出瞬时阶跃响应及预计纹波波动,这违背了实际环境中的因果关系。
建立砖墙响应模型的另一种方式是创建一个Butterworth滤波器,并使用更高的滤波阶设计滤波器,即引入更多的极数。在极限情况下,这种滤波器会表现出砖墙响应,但大家会注意到,这种系统没有下冲。这两种砖墙系统模型都是有效的,第一个模型是线性相位,第二个模型是最小相位。
2、2 线性相位
理想的线性相位概念源自群延迟概念。群延迟有时称为包络延迟,不应把它与相位延迟混淆。群延迟和相位延迟都与系统的相位相关,公式如下:
公式1 - 相位延迟
 公式2 - 群延迟
公式2 - 群延迟
相位延迟是正弦曲线在频率f上的时间延迟,它假设正弦曲线一直保持不变。群延迟是f周围一组窄频率的幅度包络。可以看到,在相位Φ(f)随着频率线性变化时,相位延迟和群延迟的解都是一个恒定的延迟。在相位与频率的关系非线性时,相位延迟和群延迟都不会对频率保持恒定。在经常遇到的带限系统中,群延迟在频段边沿附近上升。这是因为频段边沿定义为存在一个或多个极点,在滚降速率中增加20dB/十倍频程时,还会增加90度的相位滞后。在复杂的共轭对的极点中心频率上,幅度响应一般会达到峰值,群延迟也会达到峰值。这意味着在其通过系统传送时,系统的高频成分一般会延迟。在阶跃响应中,这表现为较慢的上升时间和较高的过冲,因为高频成分没有和边沿同时到达,而是在边沿传送后才到达。
线性相位系统的延迟有时是不能容忍的。为说明这种情况,看一下使用五阶Butterworth滤波器生成的阶跃响应。Butterworth滤波器是一种全极滤波器,因此是无限脉冲响应(IIR),因为极点意味着输出不仅取决于输入,还取决于某些内部存储单元,在理论上,这些单元会一直记住过去的历史。
事实上,大多数直接设计成FIR的FIR滤波器都是线性相位滤波器,因为可以选择把相位设置成最常用的线性相位。类似的,对称FIR看起来很美(即在脉冲响应的某个中心峰值周围的两侧是对称的),对称实现了线性相位。IIR滤波器通常是使用模拟滤波器设计技术设计的。大多数模拟滤波器是全极滤波器,是最小相位系统(当然不是线性相位系统),除非进行某些专门处理。
2、3 全通滤波器
一个极点会在幅度中引入3dB衰减,在极点频率上引入45度相位滞后。在极点之前,它基本上对幅度没有影响,没有相位滞后,在远远超过极点频率时,其基本上会导致幅度以20dB/十倍频程下跌,导致90度相位滞后。极点只能存在于左半个平面(LHP)中,否则系统不稳定。LHP零点的影响与极点完全相反,如果直接放在极点顶部,那么会取消极点。左半个平面(RHP)的零点完全合法。RHP零点的幅度响应与LHP零点相同,但相位影响相反。RHP零点对幅度的影响与极点相反,但对相位的影响相同。
在设计全通滤波器时,相位补偿中通常会利用最后这种影响。全通滤波器利用RHP零点和LHP极点组合,相互抵消对幅度的影响。事实证明,对相位的影响会翻一倍。换句话说,LHP极点与RHP零点相结合,可能不会对幅度响应产生任何影响,但会在极点/零点频率上产生90度相位滞后,在高得多的频率时会产生180度相位滞后。可以看到,相位补偿使用的极点和零点排列为全通滤波器网络。表1和表2概括了数字全通滤波器的部分特点。
表1 – 一阶全通滤波器信息
|
转函 |
|
|
群延迟 |
|
|
最大群延迟的频率 |
|
|
零频率群延迟(和最大群延迟) |
|
表2 – 二阶全通滤波器信息
|
转函 |
|
|
群延迟 |
|
|
最大群延迟的频率 |
|
|
零频率群延迟(和最大群延迟) |
|
通过以合适方式把多个全通滤波器级联起来,可以执行群延迟校正。第一,可以看到全极Butterworth响应不仅会引入延迟,还会引入非线性延迟。校正延迟非线性影响的唯一方式是引入一个系统,延迟某些频率成分,使其小于其它频率成分,但要注意,这总是会在系统中引起更多的延迟。
2、4 最小相位
在全通滤波器不会改变幅度的基础上,可以看到全通滤波器段组合数量是无穷大的,它们可以添加到五阶全极Butterworth滤波器中,这些组合的幅度响应完全相同、而群延迟响应不同,但所有组合都将较单纯的Butterworth滤波器在信号中引入更多的整体延迟。此外,在不影响幅度响应的情况下,在Butterworth响应中增加极点和零点的唯一方式是增加全通滤波器段,其总是有RHP零点(或数字域的单位圆外面的零)。这就引出了最小相位系统的定义。
在控制理论和信号处理中,如果系统及其倒数具有因果关系且稳定,那么随时间变化的线性系统有最小相位。
从这个定义中,可以推断,最小相位系统的所有零点都必须位于LHP中(位于单位圆内部),否则不可能对系统求倒数,因为在倒数系统中零点会变成极点。如果有系统的极点和零点位置,那么可以简便地生成最小相位系统。零点的幅度影响与其在LHP还是在RHP中无关,因此为生成最小相位系统,可以简单地把任何RHP零点移动到LHP。在s域中,这意味着改变零的实数部分的符号。在数字域中,这意味着对零点位置的倒数取复共轭值。
这也适合于全零系统。如果我们有系统的脉冲响应,那么我们可以获得定义系统的FIR滤波器的滤波器系数:
公式3 - 脉冲响应的多项式表示
如果我们取线性相位阶跃响应的脉冲响应(从阶跃响应中导出)的前50个点,并把它视为公式3形式的多项式,我们会发现这个多项式的根,这些是产生这个响应的全零FIR滤波器的零点。然后通过把根的倍数转换回到多项式,我们用发现的最小相位系统的零点,把其转换回到公式3的形式。公式3表明这个过程产生了最小相位系统脉冲响应。使用它作为FIR滤波器,通过它传送一个阶跃,我们发现最小相位系统的阶跃响应。
2、5 生成最小相位响应
如果有系统的极点和零点位置,那么可以简便地生成最小相位系统,只要把零点移动到LHP(或单位圆内部)即可。一个常见问题是您通常不知道极点位置和零点位置。所有典型的IIR滤波器都是最小相位(Butterworth,Chebyshev,等等),因为它们都是全极滤波器,所以 可以简便地设计最小相位IIR。在FIR滤波器设计中,问题本身表现为FIR滤波器一般是通过直接确定脉冲响应来设计的。这与处理公式3指出的多项式类似。生成最小相位设计的方式是设计FIR滤波器,找到描述脉冲响应的多项式的根,把外面的零点移到单位圆内部,重新扩充多项式。发现的根本身存在问题,但有许多方法。问题在于这些方法只适用于大小合理的多项式。经验表明,MathCAD在大约第30阶时开始出现问题。在使用各种方法时,大约在第50阶时开始出现问题。从整体上看,可以说,找到200 tap FIR的根不是一件易事。

公式4
2、6 示波器中的最小相位与线性相位
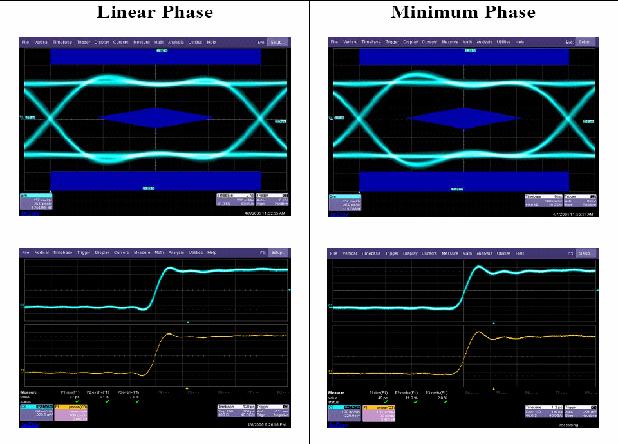
笔者认为,最小相位响应是带限系统可以实现的最佳响应。也就是说,在查看串行数据信号和眼图时,线性相位会成为争议的焦点。其原因如下图所示。下图说明了力科SDA11000串行数据分析仪对30ps阶跃和5Gb/s串行数据信号的响应。您会注意到,线性相位系统表现的非因果关系的阶跃响应转换成对称的眼图。最小相位更加自然的阶跃响应转换成略微不对称的眼图。注意,眼图测试使用的模板不是为处理任何不对称设计的,不对称是标准一致性测试中的典型情况。正是基于这些原因,力科示波器现在可以选择最小相位响应和线性相位应。
总之,对涉及眼图的测量,线性相位可能拥有更好的响应特点。此外,在测试指定示波器幅度响应特点时,不管是使用带宽、平坦度还是某个幅度特点,其一般都没有指定相位响应。事实证明,从频域角度很难理解相位或群延迟特,除非相位是线性相位。换句话说,可以简便地预测线性相位系统的时域响应,但很难预测非线性相位的系统的时域响应(而不需考察阶跃或脉冲响应)。
3、群延迟对串行数据的影响
3、1 简化的群延迟效应视图
通过重用色散代价,并对相位、而不是对幅度应用这种概念,可以简单地理解群延迟效应。色散代价定义为传输线上最高频率的信号和最低频率的信号的幅度之比。这种定义只考虑了最短的和最长的一串码型的基础成分的幅度响应。
3、2 群延迟平衡
通过把全通滤波器的多个段级联起来,可以实现群延迟平衡。我们已经从极点零点位置的角度及从数字实现的角度详细介绍了全通滤波器。在模拟域中,全通滤波器使用格子滤波器实现,既可以以这种形式使用,也可以转换成其它形式。
在非常低的频率上,电感器是一条短路,电容器是一条开路,负荷可以视为直接连接到输入上。在高频上,电感器是一条开路,电容器是一条短路,负荷视为反转的输入。查看这个段,其阻抗是:
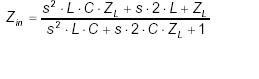 (公式5)
(公式5)
转函是:
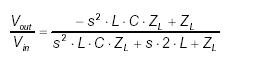 (公式6)
(公式6)
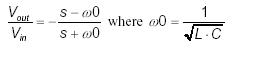
公式8 - 一阶全通滤波器段的转函
这是一阶全通滤波器段,只由实数极点和实数零点组成。这通常可以用来大体平衡群延迟。
在公式5中,如果我们设置电阻(如50欧姆) ,那么我们可以得到:
定义了在阻抗一定时系统中的电感与电容之间的固定关系。
*博客内容为网友个人发布,仅代表博主个人观点,如有侵权请联系工作人员删除。